My enthusiasm for driving and mountain biking have led me to be interested in humans' ability to move through a complex world, often much faster than we evolved to do, and safely reach our goals while generally avoiding any obstacles that threaten us. I am fascinated by our ability to take in vast amounts of complex information about our surroundings and rapidly process what is relevant to our current and future safe locomotion. When driving, for example, we must maintain a "field of safe travel" (Gibson & Crooks, 1938) which involves not only maintaining our current lane position and distance from other road users, but also being able to anticipate what other road users may do before they act in order to avoid collision. Similarly, the act of riding a bicycle on a twisting path while avoiding rocks, roots, and trees requires amazingly fast, adaptive control mechanisms that can instantaneously guide avoidance behavior while keeping the cyclist away from upcoming hazards.

The attentional resources required to control these various kinds of locomotion are not well understood. This can be witnessed in the literature surrounding distracted driving, where the role of "cognitive" attentional processes in vehicular control is hotly debated among laboratory studies and naturalistic field studies (see, for example, Strayer, Drews, & Crouch, 2006 and Klauer et al, 2010). Gaining a deeper understanding of the ways in which attention modulates locomotion is fascinating to me from both theoretical and practical perspectives. On this page I'll present a brief overview of my research interests and a few studies I've worked on that I find particularly interesting.
Graduate Work
During my graduate work at Brown University, I studied the perceptual underpinnings of locomotor control using a large-scale virtual environment, the VENLab. Early in my graduate career I investigated whether we could predict human interceptive paths using only online, immediately available perceptual information; in other words, whether it is necessary to infer cognition to explain the routes that people take to intercept moving targets and avoid obstacles. This proved to be the case, as a dynamic model using only information currently available in the environment was able to accurately predict interception paths to targets moving on both straight and curving trajectories (Owens & Warren, 2004; 45th Annual Meeting of the Psychonomic Society).
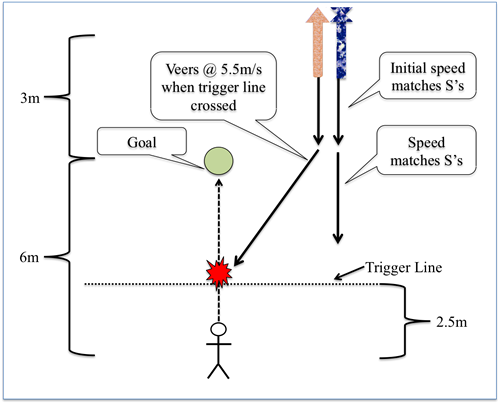
Turning to the issues surrounding attentional control of locomotion, I began to consider cases where it is important to anticipate the future behavior of other objects - when driving, for example - and expanded this line of research to study under what circumstances anticipation can play a role in our locomotion and what role attention serves in this. For my dissertation studies (journal article in prep), I asked participants to walk in virtual reality toward a stationary goal while avoiding moving obstacles. Here, the obstacles were predictable based on their appearance; some of the obstacles would move quickly to collide with the participant if he/she were to walk straight toward the goal (conflict), while the others would never pose a threat (non-conflict). Importantly, the initial movement of these obstacle types was identical, so participants were forced to discriminate conflict and non-conflict obstacles based solely on appearance.
In order to avoid collision, the participant was required to make an avoidance maneuver (deviate his/her path) before reaching an invisible trigger line, after which conflict obstacles would veer rapidly in his/her direction at an unavoidable rate of speed. In the initial experiment, participants proved adept at this, and were able to pre-emptively deviate their paths for conflict obstacles while maintaining a more efficient straight for "safe" ones. A birds-eye view of a representative condition may serve to clarify the design:
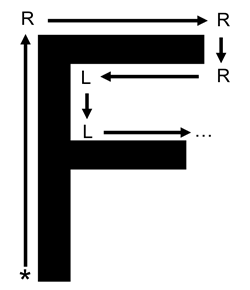
In the following two studies, participants were asked to perform the same task, but to engage in a visuo-spatial secondary task in addition to the obstacle avoidance task. This secondary task was a verbal Brooks Letter Task, which required participants to imagine themselves traveling clockwise around the outside of a capital letter presented to them at the start of each trial. Keeping time with a 1 Hz metronome, participants reported which direction they would turn to stay "on" the outside of the letter as they traveled around it. For the following example, a participant would report "right, right, right, left, left..." and so un until the end of the trial.
The initial study used this classic version of the task, with each trial having one of a selection of 16 possible letters. The results of this study showed that participants had more difficulty anticipating obstacle movement when performing this secondary task, but that with sufficient practice they were able to perform the locomotor task reasonably well.
For the final study, participants were given a more difficult version of the letter task. In addition to having several backwards letters added to the mix ("Imagine you are traveling around a backwards Z"), participants were also asked to provide an additional piece of information at each corner, which was whether that corner was at the top/bottom of the letter ("yes") or not ("no"). So, instead of saying "Right, Right, Right, Left..." as in the example above, participants would here have to respond "Right Yes, Right Yes, Right No, Left No, Left No..." This more difficult version of the secondary task reduced participants' performance to where there was no discernable distinction between conflict and non-conflict obstacles no matter how much practice they received, and participants rarely deviated their paths from straight ahead.
The conclusion is that, in general, people possess the ability to anticipate the future movements of predictable obstacles. However, when they are engaged in visuo-spatial secondary tasks, the ability to anticipate obstacle movement becomes degraded. Further, this degradation scales with the complexity of the secondary task in which they are engaging. These findings, along with other recent work in locomotor control (e.g. Fajen & Warren, 2007) may begin to lay the foundation for a view of locomotion that could separate locomotor control and guidance into distinct processes underpinned by varying types of attentional resources.The questions of exactly what types of attentional processes are used, in what situations, and our abilities to prioritize and shift control among attentional and locomotor tasks are all fertile areas for further research. These questions have both theoretical importance as well as real-world significance when we consider problems such as distracted driving, where there is a very real intersection of locomotor control and the occupation of attentional resources.
Virginia Tech Transportation Institute
After graduate school, I decided to focus my work on applied problems in transportation safety. During my time at the Virginia Tech Transportation Institute I have worked on a variety of safety-related projects for the government, industry, and automotive manufacturers. One particularly interesting study was an examination of an in-vehicle voice control system. Here, my colleagues and I studied the performance of participants who drove on public roads and a closed-road course while they dialed mobile phones, had phone conversations, operated MP3 players, and texted using both their personal phones and the Ford SYNC system. For phone calls and music playback, the system used voice recognition ("Call John Doe"; "Play track Master of Puppets"), while text messaging read aloud incoming messages using text-to-speech but required participants to visually cycle among pre-determined outgoing messages.
The results of the on-road portion of the study (Owens, McLaughlin & Sudweeks, 2010) found that dialing the phone and playing music tracks by hand showed significant degradation of driving behavior over voice control for several measures, including several glance frequency and duration measurements, steering variance and maximum steering wheel velocity, and subjective workload measurements. Degraded performance was not found for conversation tasks compared to baseline, however, whether these were performed using a handheld phone or the voice system.
The text-messaging portion of the study (Owens, McLaughlin & Sudweeks, 2011) was performed on a closed-road course for safety. For this portion, participants drove on the Virginia Smart Road while sending and receiving text messages using their phone and the in-vehicle system. Here, we found that handheld sending and receiving and using the vehicle system to send messages showed degradations in eyeglance, vehicle control, and subjective workload measures compared to baseline, but receiving spoken-aloud text messages did not.
Currently, I am working on a study of "brain-training" computer software targeting older drivers, as well as several other proprietary projects studying issues including driver distraction.